FreeRTOS는 MIT라이센스의 오픈소스 라이브러리이다.
STM은 STM32CubeMX라는 프로그램을 사용하여 FreeRTOS와 같은 라이브러리를 쉽게 포팅할 수 있다. 하지만 한번쯤은 CubeMX는 기본 프로젝트만 생성하고 베어메탈(Bare Metal,하드웨어 상에 어떤 소프트웨어도 설치되어 있지 않은 상태) 상태에서 FreeRTOS를 포팅해보고 싶었다. 그 과정을 공유드립니다.
개발환경
- STM32F7508-DK 보드 사용
- STM32CubeIDE – 1.10.1
- CubeMX – 6.7.0
- STM32F7 MCU Package – 1.17.0
1. CubeMX로 프로젝트 생성
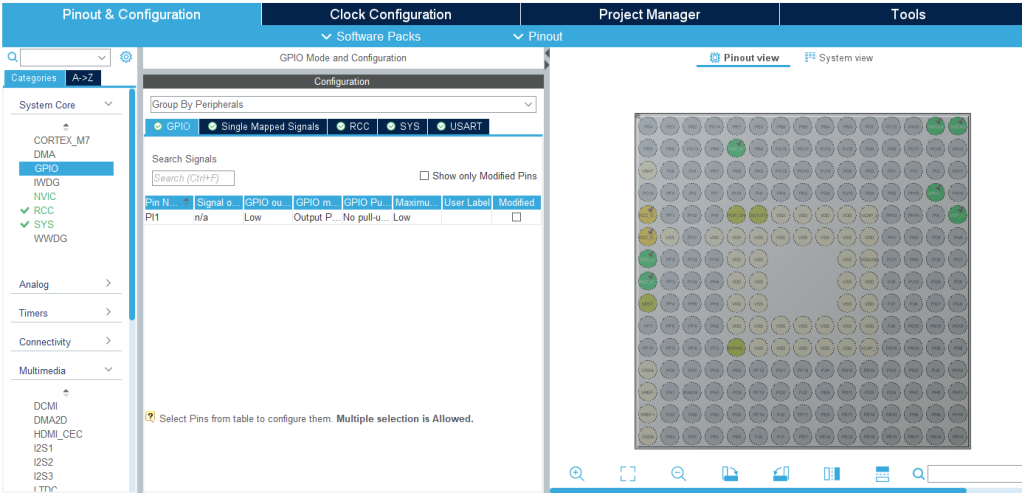
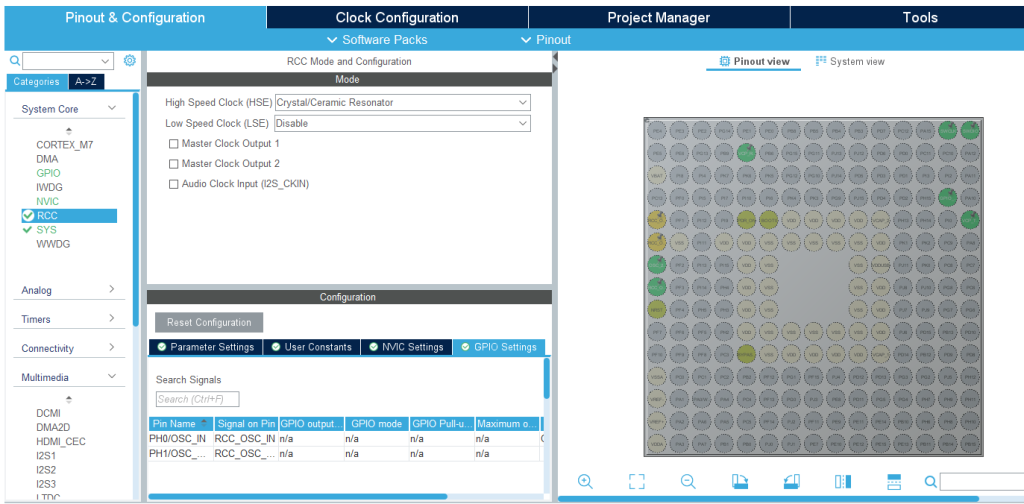
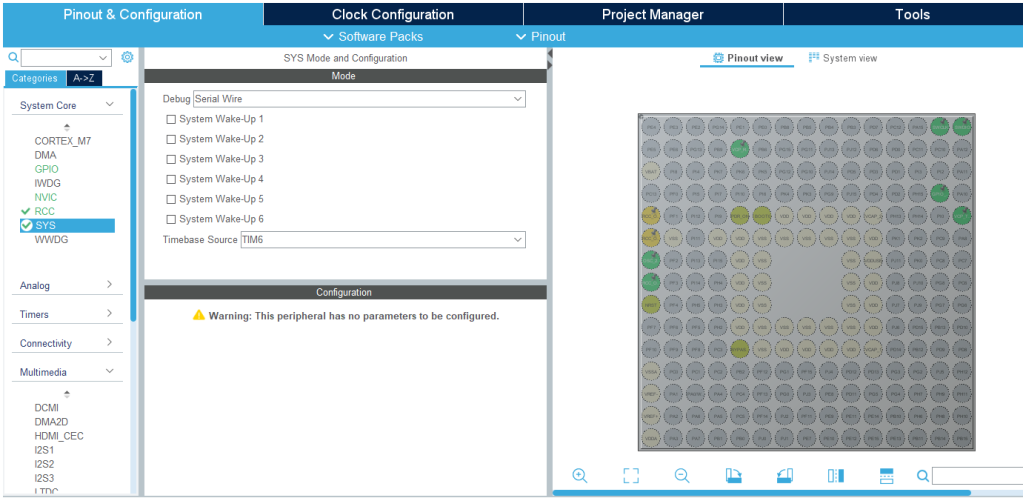
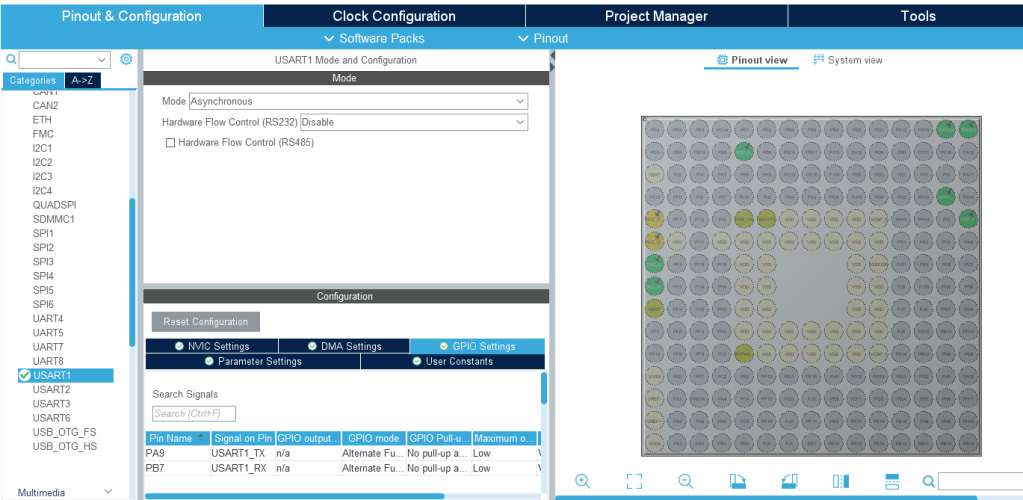
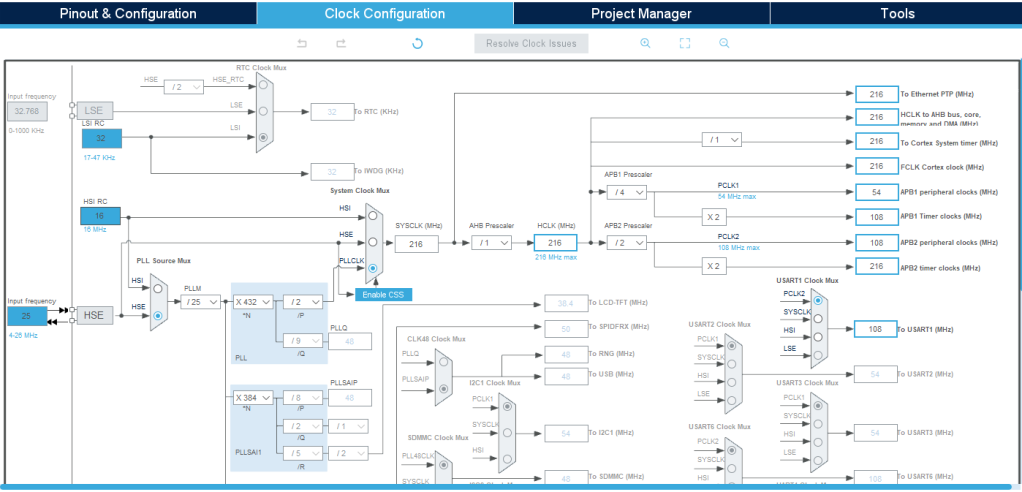
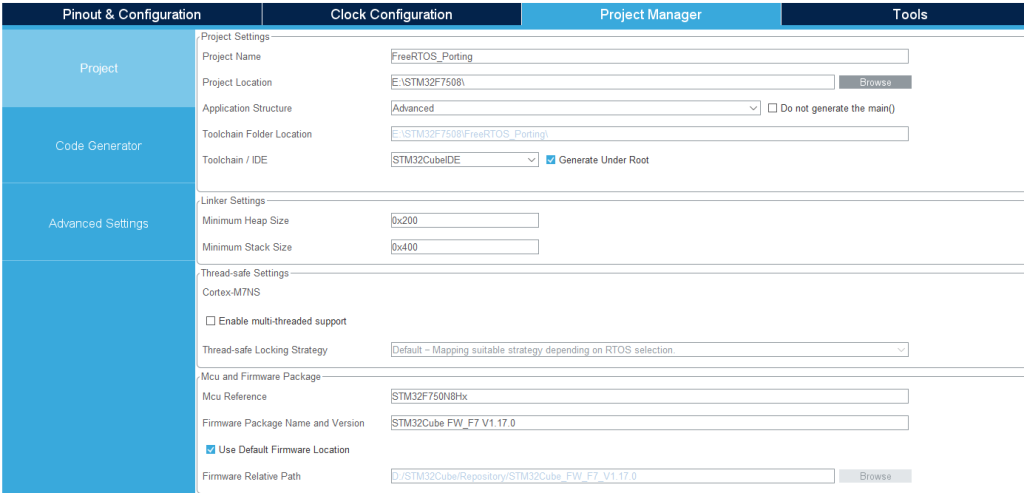
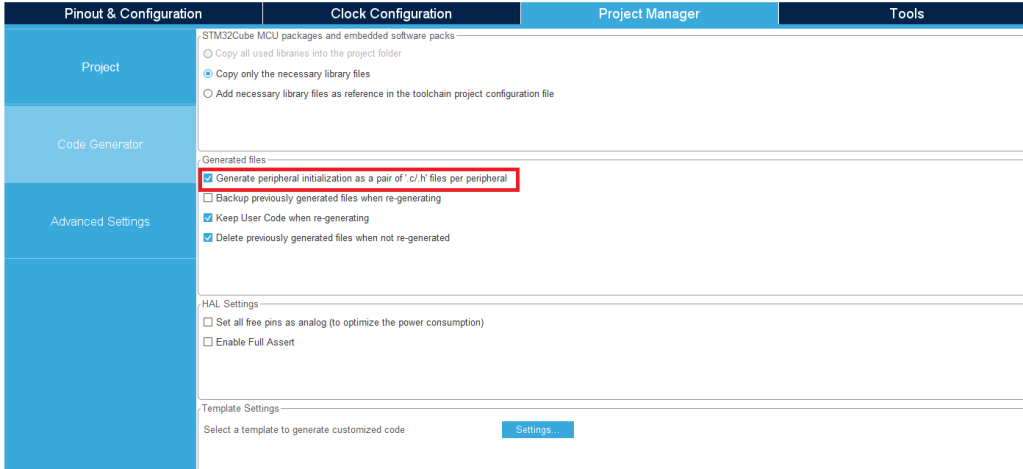
먼저 CubeMX를 이용하여 기본 프로젝트를 생성합니다. 제가 가진 보드에 맞게 아래와 같이 설정하였습니다.
– GPIO_PI1 – GPIO_Output, LED 확인용
– USART1 – 로그 확인용
– HSE – Crystal/Ceramic Resonator – 외부 크리스탈 사용
– Debug – Serial Wrie
– Sys – Timebase Source: TIM6
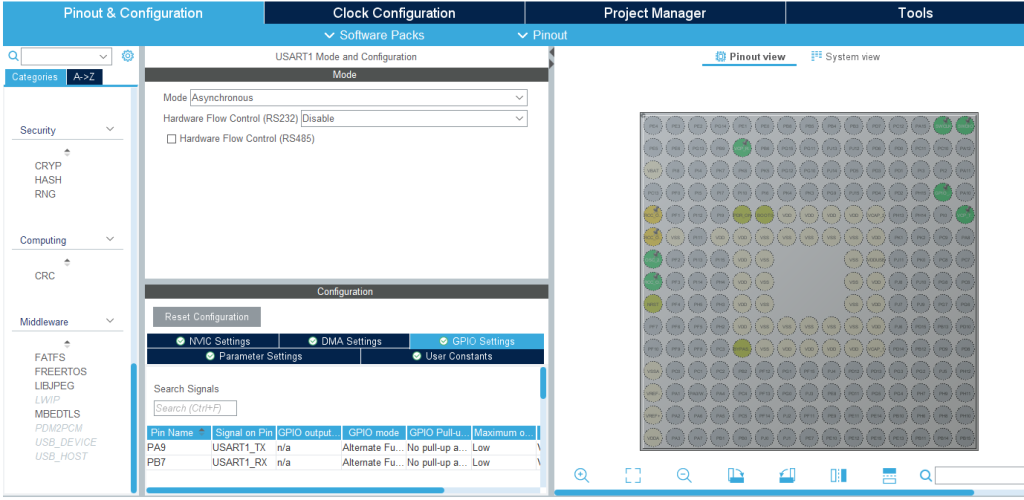
위와 같이 설정하고 GENERATE CODE를 합니다.
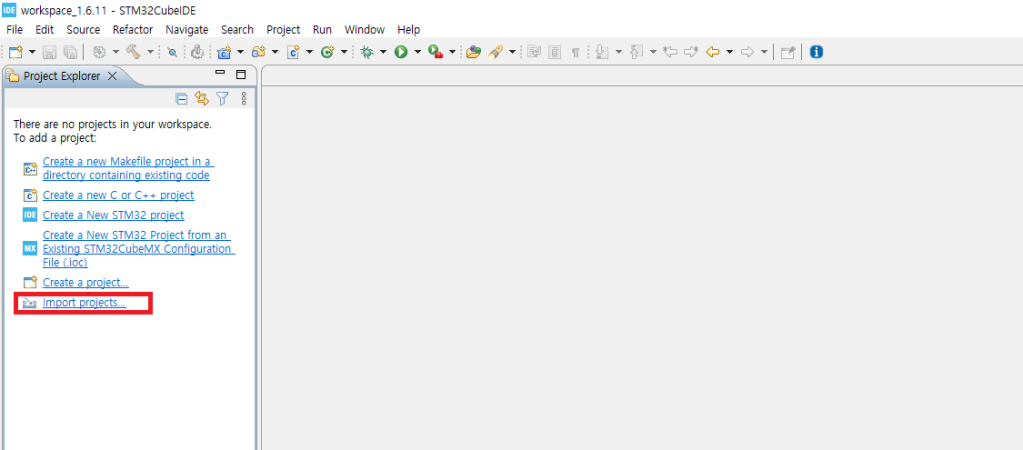
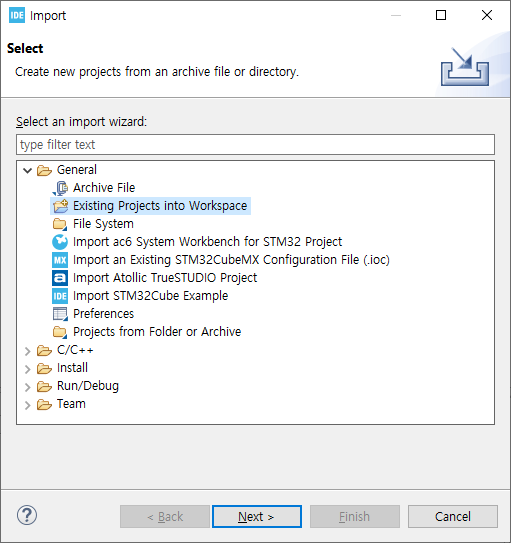
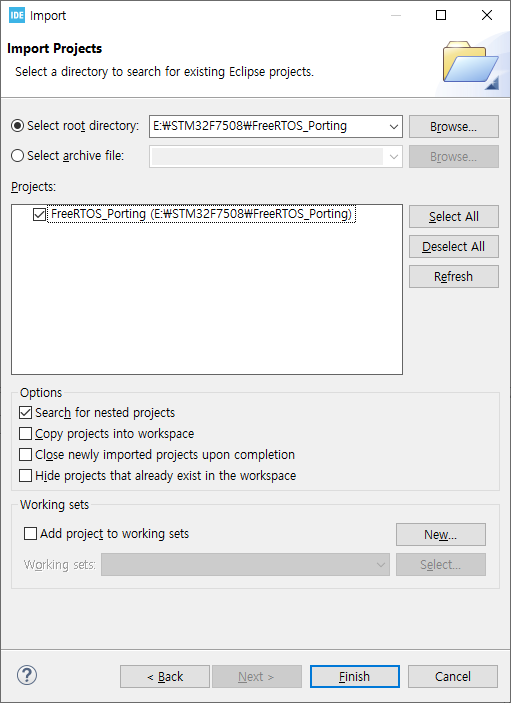
2. STM32CubeIDE로 프로젝트 열기
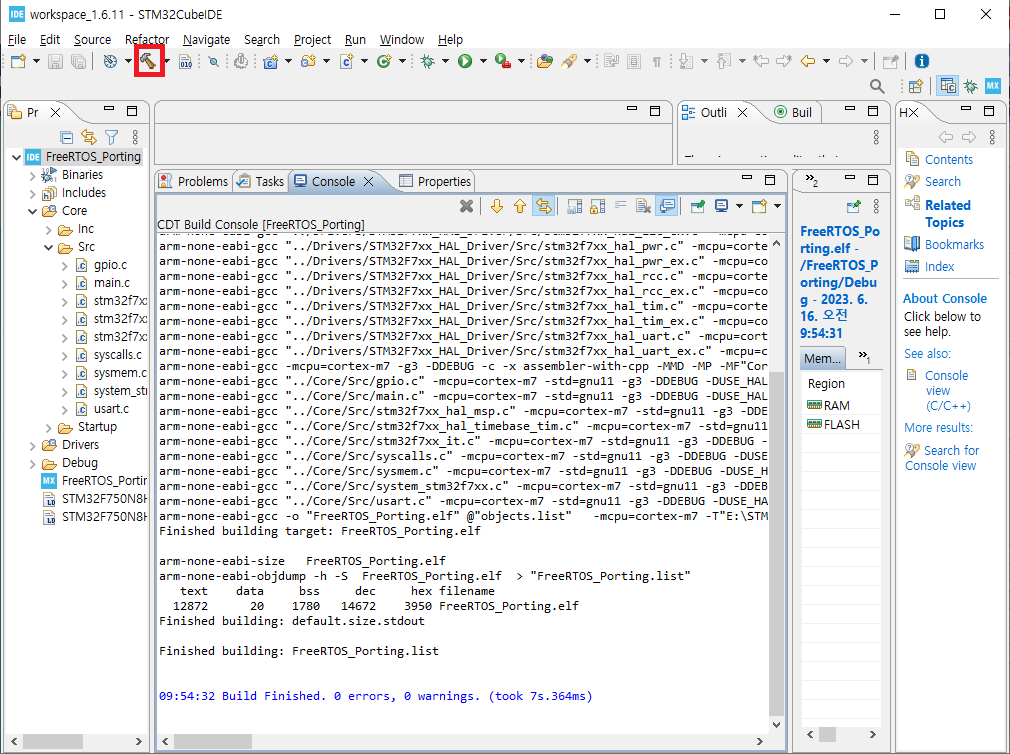
위와 같이 빌드가 성공적으로 되었으면 기본 프로젝트 생성은 완료 되었습니다.
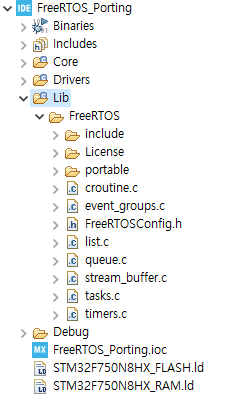
3. FreeRTOS를 포팅하기 위한 프로젝트 구조 만들기
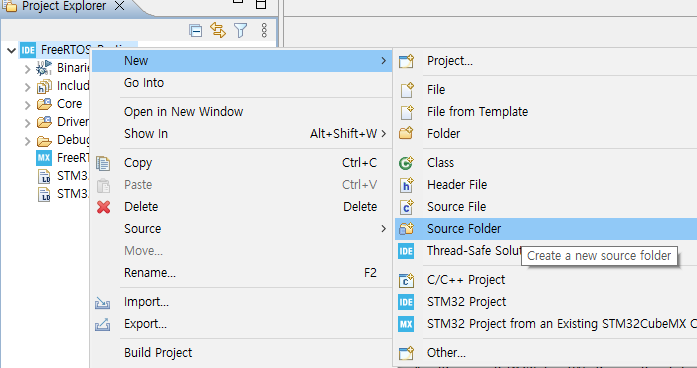
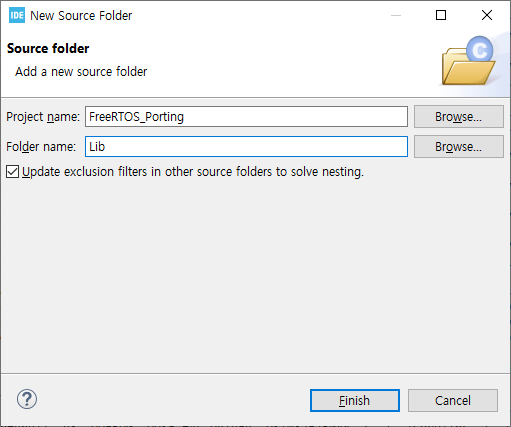
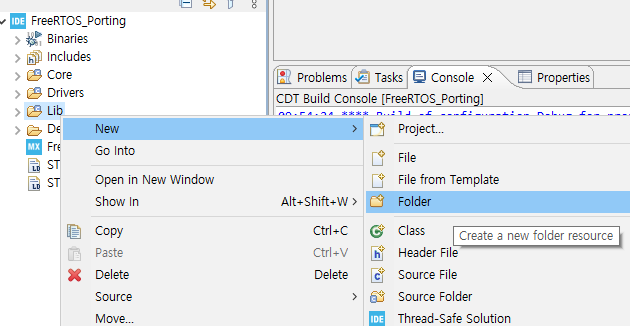
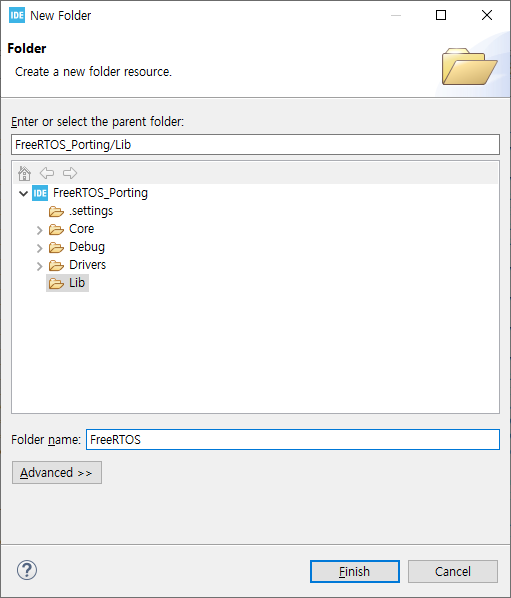
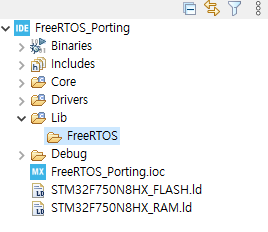
이제 본격적으로 FreeRTOS를 포팅하도록 합니다.
4. FreeRTOS 라이브러리 다운로드
FreeRTOS 다운로드는 공식홈페이지 https://www.freertos.org/index.html 에서 할 수 있습니다.

다운 받은 압축 파일을 풀고 폴더 안을 보면 다음과 같이 파일들이 존재합니다.
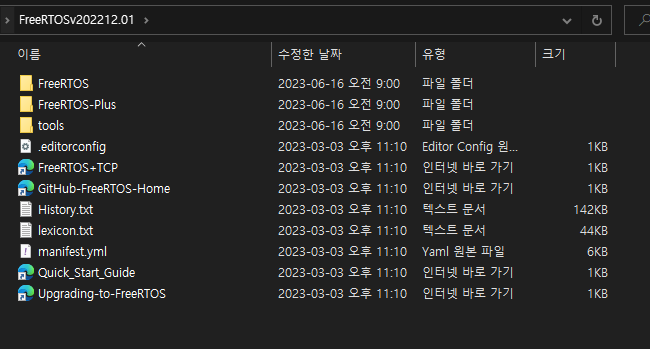
여기서 저희는 FreeRTOS 폴더를 사용할 것입니다.
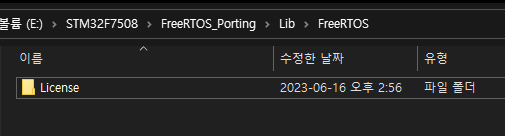
먼저, FreeRTOS폴더 안에 있는 License폴더를 프로젝트에서 생성한 FreeRTOS 폴더에 복사해줍니다.
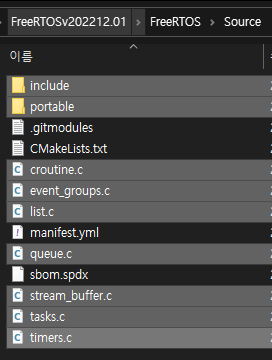
또, FreeRTOS > Source 폴더로 가면 아래와 같이 파일이 있습니다. 선택한 파일들을 프로젝트에서 생성한 FreeRTOS 폴더에 복사해줍니다.
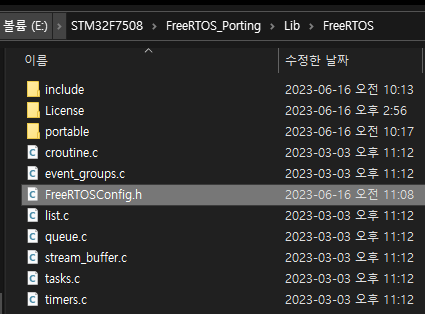
이제 프로젝트 폴더로 와서 Lib > FreeRTOS > Portable 폴더로 가면 다양한 폴더들이 존재합니다.
여기서 저희는 GCC 기반인 STM32CubeIDE를 사용할 것이므로 GCC 폴더와, 메모리 관련 코드가 들어있는 MemMang 폴더를 남겨두고 나머지 파일들은 삭제합니다
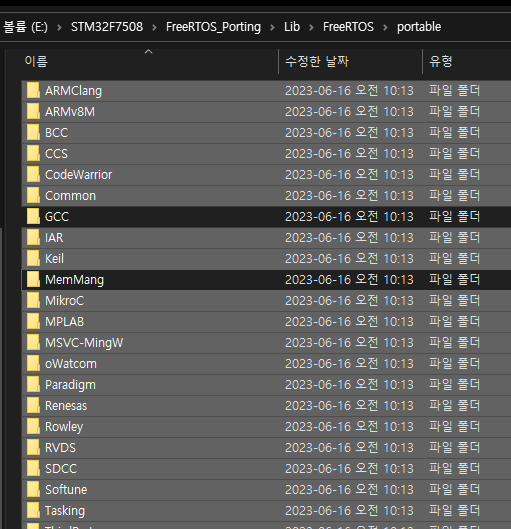
GCC, MemMang 폴더만 남기고 삭제
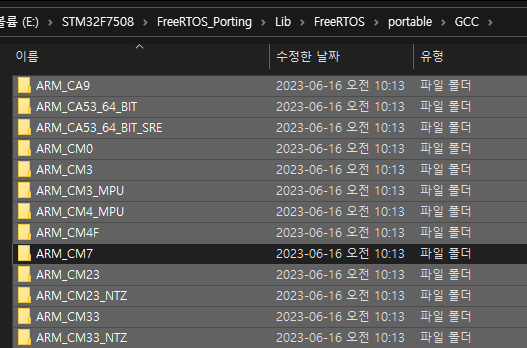
GCC 폴더로 들어가면 다양한 프로세서별 코드가 존재합니다. 여기서 저는 M7을 사용하므로 ARM_CM7을 제외하고 모두 삭제합니다. ( 사용자에 맞는 프로세서만 남기고 삭제)
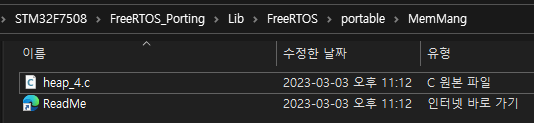
또 MemMang 폴더로 가서 heap_4.c 를 제외하고 나머지는 삭제합니다.(안 그러면 충돌 일어나요)
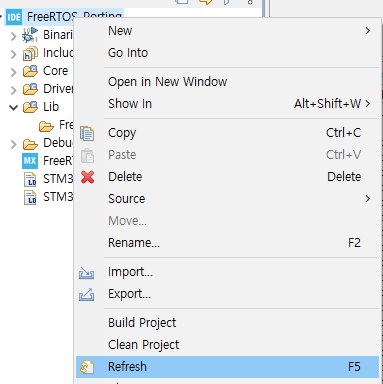
이제 CubeIDE로 와서 프로젝트를 Refresh 해줍니다.
이제 프로젝트 빌드를 해봅니다.
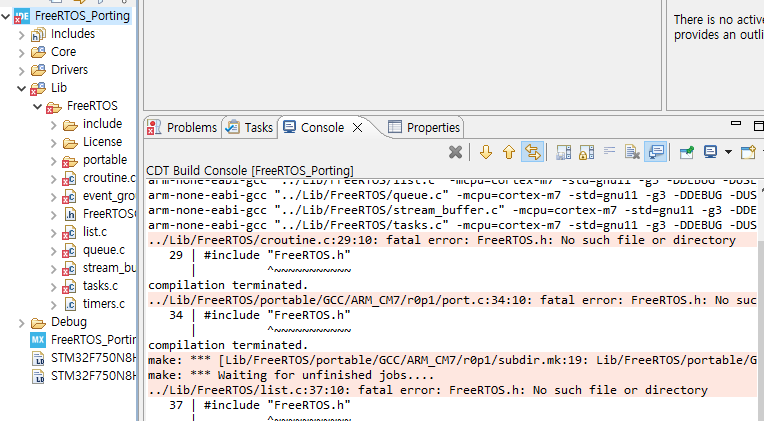
오마이갓! 수 많은 에러가 나타납니다. 보통 이렇게 많은 에러가 발생하게 되면 겁먹고 여기서 중단하게 됩니다. 하지만 당황하지 말고 하나하나 처리해나가봅니다.

위 에러는 FreeRTOS.h를 찾을 수 없다는 에러인데 우리는 파일만 추가 했을 뿐 프로젝트에서 include시켜주진 않았습니다. 프로젝트 속성으로 가서
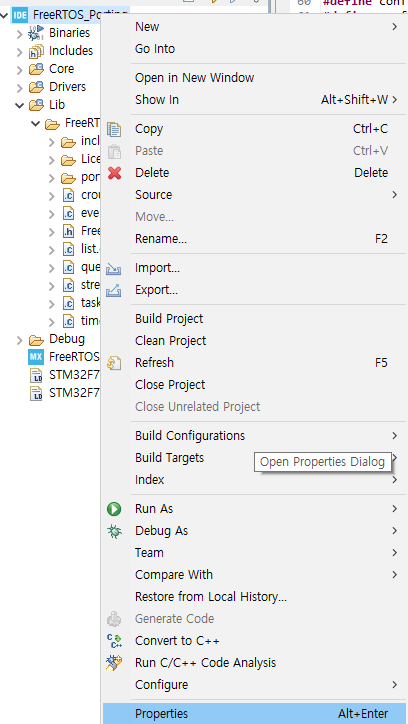
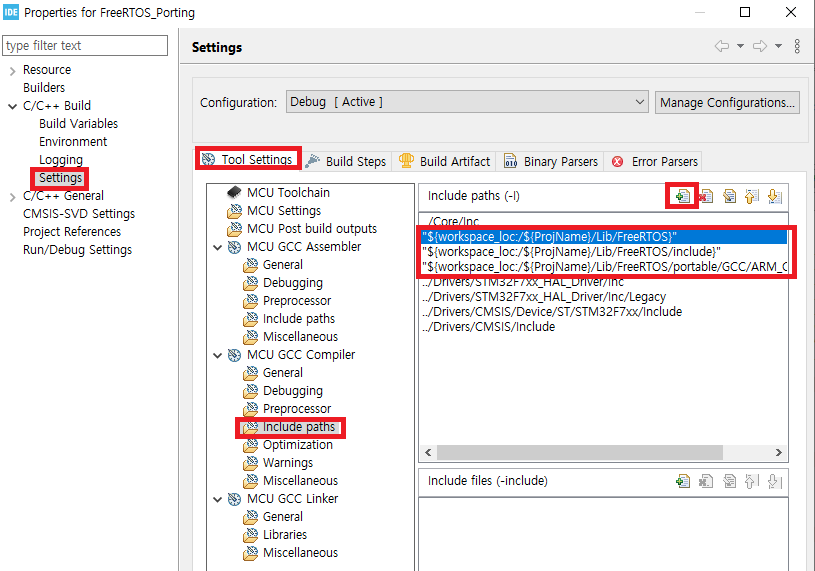
MCU GCC Compiler > Include paths 메뉴로 가서 다음을 추가해줍니다.
- “${workspace_loc:/${ProjName}/Lib/FreeRTOS}”
- “${workspace_loc:/${ProjName}/Lib/FreeRTOS/include}”
- “${workspace_loc:/${ProjName}/Lib/FreeRTOS/portable/GCC/ARM_CM7/r0p1}”
** 여기서 ARM_CM7 path는 사용하는 프로세서 마다 다르니 꼭 확인이 필요합니다.
추가 되었으면 Apply and Close를 누른 후 다시 Build해줍니다.

이번엔 FreeRTOSConfig.h가 없다고 메세지가 나오네요..
홈페이지에 가 봅니다..
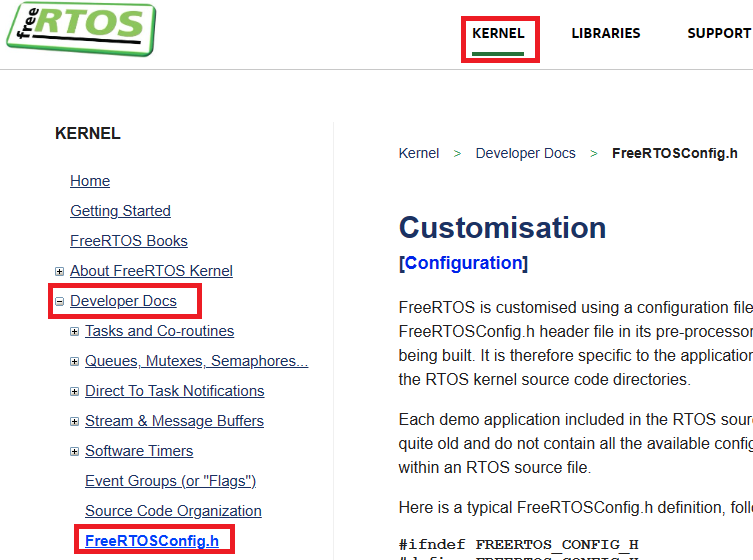
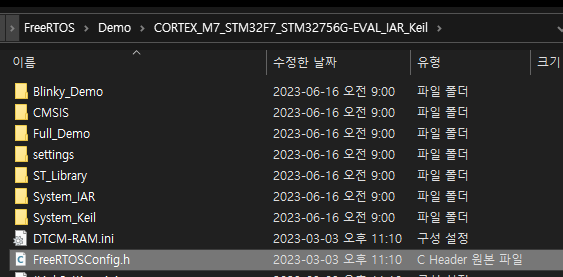
Kernal > Developer Docs > FreeRTOSConfig.h 에 들어가니 헤더 파일 내용이 있습니다. 이 내용을 복사하셔도 되고, 다운받은 FreeRTOS 라이브러리 안에 Demo 폴더에 보면 각 프로세스마다 파일이 있는데 여기서 복사하셔도 됩니다. 저는 Demo 폴더에서 FreeRTOSConfig.h를 가져오겠습니다.
그러고 또 프로젝트 Build를 하면 다음과 같이 에러가 발생합니다.
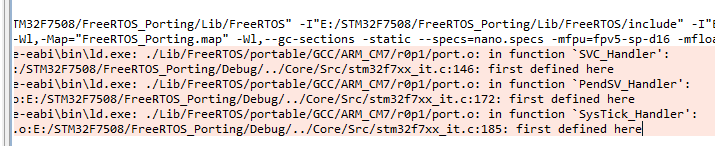
내용을 보니 SVC_Handler와 PendSV_Handler, SysTick_Handler가 중복 정의되어 충돌이 일어나는거 같습니다.
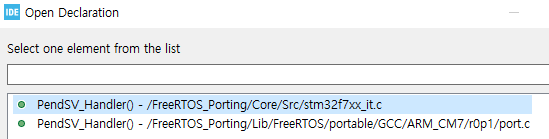
확인해보니 다음 두 곳에서 정의되는거 같네요.
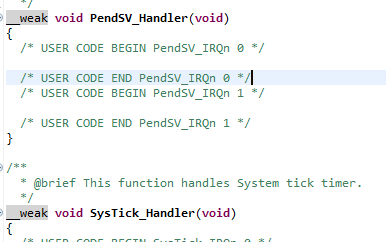
우리는 FreeRTOS를 사용할 거니까 stm32f7xx_it.c에서 충돌나는 Handler 함수를 지워줍니다.
저는 SVC_Handler와 PendSV_Handler, SysTick_Handler 앞에 __weak를 붙여 해결했습니다.
다시 프로젝트 Build를 하면 다음과 같이 에러가 발생합니다.

이제 FreeRTOSConfig.h로 갑니다.
vApplicationTickHook과 관련된 define이 뭐가 있을까하고 Tick을 검색해봅니다.

configUSE_TICK_HOOK이 있네요. 이 것을 0으로 설정해주고 다시 Build해 봅니다.
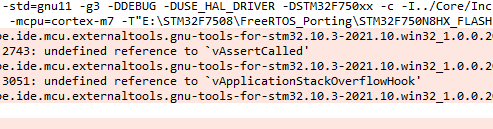
그러면 vApplicationTickHook 에러가 사라졌는데 vAssertCalled 에러가 발생했네요
FreeRTOS홈페이지의 FreeRTOSConfig.h 페이지에서 아래 내용을 확인, 복사합니다.
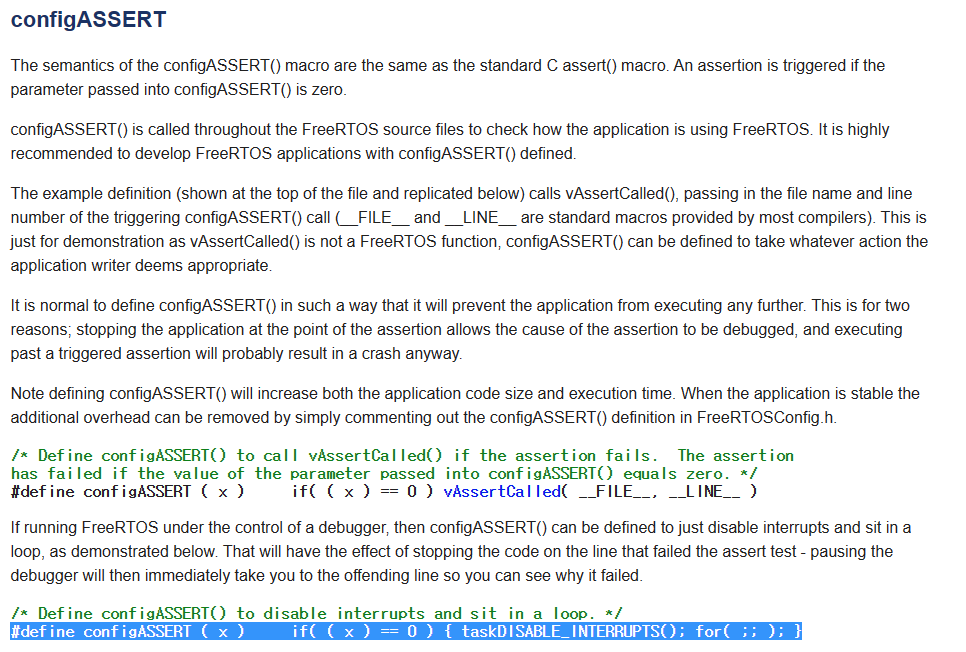
다시 프로젝트의 FreeRTOSConfig.h로 와서 configASSERT 정의를 찾아 바꿔줍니다.(위 구문 그대로 복사하면 에러가 납니다… configASSERT와 ( x ) 사이의 공백을 제거해 주세요..)

또 프로젝트 build를 하면 아래와 같이 에러가 나타납니다.
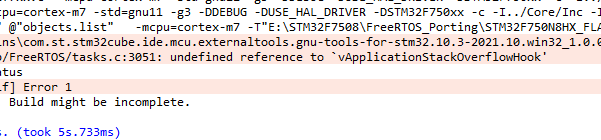
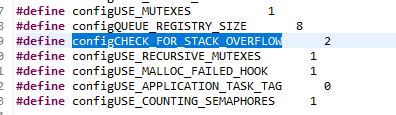
그래서 다시 FreeRTOSConfig.h 에서 Stack Overflow에 관련된 정의를 찾으니 configCHECK_FOR_STACK_OVERFLOW가 있네요. 이걸 0으로 바꿔줍니다.
그리고 다시 프로젝트 빌드를 하면
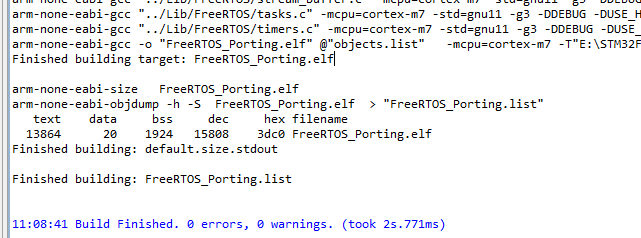
짠!!! 드디어 에러를 다 잡았습니다.
이제 main.c로 가서 예제 코드를 작성해봅니다.
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
#include "FreeRTOS.h"
#include "task.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MPU_Config(void);
/* USER CODE BEGIN PFP */
static void task1_handler(void* parameters);
static void task2_handler(void* parameters);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
TaskHandle_t task1_handle;
TaskHandle_t task2_handle;
BaseType_t status;
/* USER CODE END 1 */
/* MPU Configuration--------------------------------------------------------*/
MPU_Config();
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
status = xTaskCreate(task1_handler, "Task-1", 256, "Hello Task-1", 2, &task1_handle);
status = xTaskCreate(task2_handler, "Task-2", 256, "Hello Task-2", 2, &task2_handle);
vTaskStartScheduler();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 432;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode
*/
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_7) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
static void task1_handler(void* parameters)
{
while (1)
{
vTaskDelay(1);
printf("%s\r\n", (char*)parameters);
}
}
static void task2_handler(void* parameters)
{
while (1)
{
vTaskDelay(1);
printf("%s\r\n", (char*)parameters);
}
}
/* USER CODE END 4 */
/* MPU Configuration */
void MPU_Config(void)
{
MPU_Region_InitTypeDef MPU_InitStruct = {0};
/* Disables the MPU */
HAL_MPU_Disable();
/** Initializes and configures the Region and the memory to be protected
*/
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.BaseAddress = 0x0;
MPU_InitStruct.Size = MPU_REGION_SIZE_4GB;
MPU_InitStruct.SubRegionDisable = 0x87;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.AccessPermission = MPU_REGION_NO_ACCESS;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_DISABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_SHAREABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* Enables the MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/**
* @brief Period elapsed callback in non blocking mode
* @note This function is called when TIM6 interrupt took place, inside
* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment
* a global variable "uwTick" used as application time base.
* @param htim : TIM handle
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* USER CODE BEGIN Callback 0 */
/* USER CODE END Callback 0 */
if (htim->Instance == TIM6) {
HAL_IncTick();
}
/* USER CODE BEGIN Callback 1 */
/* USER CODE END Callback 1 */
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
위와같이 task1과 task2를 만들고 parameter를 출력하도록 작성하였습니다.
컴파일을 해봅니다.

vApplicationMallocFailedHook 에러가 발생했습니다.
이 에러를 제거하기 위해선 vApplicationMallocFailedHook 함수를 만들거나 FreeRTOSConfig.h에서 관련 config를 제거하는 방법이 있습니다. 저는 config를 제거하겠습니다.

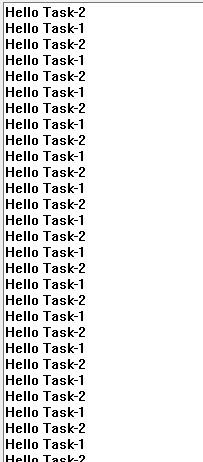
컴파일을 하면 에러가 없는 것을 확인하였고, 다운로드를 하면 아래와 같이 로그를 볼 수 있습니다.
다른 프로세서를 사용하거나 다른 데모에서 config 파일을 가져왔으면 과정이 조금씩 다를 수 있으나 큰 틀로 보면 비슷할 겁니다.
이것으로 FreeRTOS 포팅 과정 설명을 마치겠습니다.
감사합니다.
'MCU > STM32CubeIDE' 카테고리의 다른 글
| [STM32CubeIDE] 브레이크포인트 비활성화 되는 현상 해결 (1) | 2022.09.21 |
|---|---|
| [STM32CubeIDE]Terminal 설치하기 (0) | 2021.01.31 |
| [STM32CubeIDE]Printf %f 출력하기 (0) | 2021.01.23 |
| [STM32CubeIDE] ST-LINK 프로그램 에러 해결(DEV_TARGET_NOT_HALTED) (0) | 2021.01.22 |